
Si ya tiene una cuenta existente de otra aplicación de Cat, puede usar la misma cuenta para iniciar sesión aquí
Una cuenta. Todo Cat.
Su cuenta de Caterpillar es la única cuenta que utiliza para iniciar sesión y seleccionar los servicios y las aplicaciones que ofrecemos. Compre piezas y máquinas en línea, gestione su flota, conéctese desde sus dispositivos móviles y mucho más.
Información de la cuenta
Configuración del sitio
Seguridad
Operación contra fallas de grupos electrógenos en paralelo
Ed Schroeder
Especialista de ingeniería sénior
Corriente Eléctrica de Caterpillar
Keith Folken
Especialista de ingeniería sénior
Innovación y Desarrollo Tecnológico de Caterpillar
Octubre de 2016
INTRODUCCIÓN
En instalaciones con una gran demanda de energía, como un hospital o un centro de datos, la comunicación entre los grupos electrógenos es crucial para mantener los niveles de energía. En estos tipos de aplicaciones, los grupos electrógenos se pueden conectar por vía eléctrica para gestionar la gran demanda energética. Llamados grupos electrógenos en paralelo, esta configuración ayuda a garantizar un intercambio y respuesta de cargas más eficientes dentro de una red.
Una manera de operar sistemas de potencia con grupos electrógenos en paralelo es utilizar controladores multifunción exclusivos del grupo electrógeno con motor con controles en paralelo integrados en la placa del grupo electrógeno. Con el Sistema de Control Cat® EMCP 4.4, los controladores individuales se comunican entre sí por medio de una estructura central de Ethernet para sincronizar los grupos electrógenos a través de una conexión a un solo interruptor Ethernet.
Este enfoque de paralelismo es económico, porque integra la función de los dispositivos de control en paralelo discretos y los controladores lógicos programables con los controles del grupo electrógeno, y reduce la huella del equipo de conmutación, lo que genera menores costos de capital del proyecto. Sin embargo, es un enfoque que suscitó algunas preguntas entre los diseñadores y usuarios de sistemas de potencia:
- ¿Qué sucede si falla el interruptor Ethernet y los grupos electrógenos no pueden comunicarse?
- ¿Qué sucede si se rompe el enlace de uno o más grupos electrógenos y esas unidades quedan incomunicadas?
- En esas condiciones, ¿el sistema de potencia sigue funcionando, compartiendo cargas y respondiendo a los cambios de carga de manera segura y estable?
Para los grupos electrógenos equipados con un control EMCP 4.4 y Enlace de Datos de Múltiples Generadores (MGDL, Multiple-Generator Data Link), sin lugar a dudas la respuesta es sí. La estrategia patentada de Caterpillar llamada operación contra fallas adaptativa de intercambio/caída de carga está programada en el sistema EMCP 4.4 para cambiar las unidades de manera inteligente a un esquema de control que permite el funcionamiento ininterrumpido y estable durante el tiempo que sea necesario para restablecer la comunicación completa. La pérdida de comunicación también activa una alarma que alerta al personal de operaciones el estado, a fin de agilizar las reparaciones.
Conocer el riesgo
El enfoque tradicional a las fallas de comunicación en los grupos electrógenos en paralelo acarrea riesgos de inestabilidad del sistema y funcionamiento inseguro del motor. En la respuesta convencional a una falla en la comunicación, las unidades se dividen en dos modalidades: caída e isócrono. Las unidades de caída se colocan automáticamente en un nivel de carga objetivo fijo y predeterminado; por ejemplo, el 50 % de carga a frecuencia nominal. Las máquinas de oscilación isócrona, también llamadas máquinas de oscilación, absorben la mayor parte de los cambios de carga. Las unidades de caída comienzan a levantar cargas solo cuando las unidades isócronas se sobrecargan más del 100 % de su capacidad nominal.
Este esquema de control tiene dos grandes desventajas. Por un lado, los grupos electrógenos de caída pueden estar funcionando a un porcentaje de carga diferente en el momento en que pierde la comunicación. En efecto, tienen que adaptarse de inmediato a la frecuencia y carga en la curva de caída. Esto puede implicar la adición o disminución repentina del combustible para adecuarse a la frecuencia de los grupos electrógenos isócronos, lo que podría provocar inestabilidad en el sistema y pérdida de sincronización. Por otro lado, el grupo isócrono también puede sobrecargarse a medida que aumenta la carga, incluso después de estabilizar el sistema. Aunque los grupos electrógenos de caída pudieran agregar más carga, el diseño lo impide.
Otra deficiencia de este enfoque es que limita la capacidad de potencia del sistema innecesariamente. La potencia de salida de las máquinas de oscilación cambia para adaptarse a las variaciones de carga, mientras se mantiene una velocidad y frecuencia constantes en el sistema. Las unidades de caída, con la configuración fija en el 50 % de carga, siempre producen la misma potencia de salida a una velocidad o frecuencia determinadas. En consecuencia, la carga disponible máxima para este tipo de sistema se limita a la producción combinada de las máquinas de oscilación y la salida de potencia fija total de las máquinas de caída. Toda carga superior al máximo disminuye la velocidad y frecuencia. Si la carga aumenta más allá de esta carga máxima disponible, las máquinas de oscilación se pueden sobrecargar incluso si las unidades de caída funcionan muy por debajo de sus capacidades máximas.
Además, en este enfoque de control la carga mínima del sistema no puede ser inferior a la salida fija combinada en las unidades de caída. Si esto sucede, aumenta la frecuencia del sistema y las máquinas de oscilación se pueden motorizar o recibir alimentación inversa.
Estabilización del rendimiento del sistema
En el enfoque de operación contra fallas adaptativa de intercambio/caída de carga con el EMCP 4.4, se mantiene de forma segura la estabilidad en caso de pérdida de la comunicación, gracias a la transición perfecta a la modalidad contra fallas con un movimiento gradual y estable hacia el nuevo punto de equilibrio.
Con este enfoque, se activa la modalidad contra fallas cuando no se reciben mensajes de comunicación de una o más unidades EMCP 4.4 después de un intervalo de tiempo específico. La comunicación se puede perder por situaciones como cables rotos, configuración errónea, pérdida de potencia al enrutador Ethernet, al dispositivo central o a una unidad EMCP 4.4.
Cuando se pierde la comunicación, la modalidad de falla cambia de manera inteligente algunas unidades perdidas a la caída adaptativa contra fallas y otras unidades al intercambio de carga isócrono contra fallas. Las modalidades de funcionamiento de las unidades durante la pérdida de comunicación se actualizan según sea más conveniente para el sistema del generador.
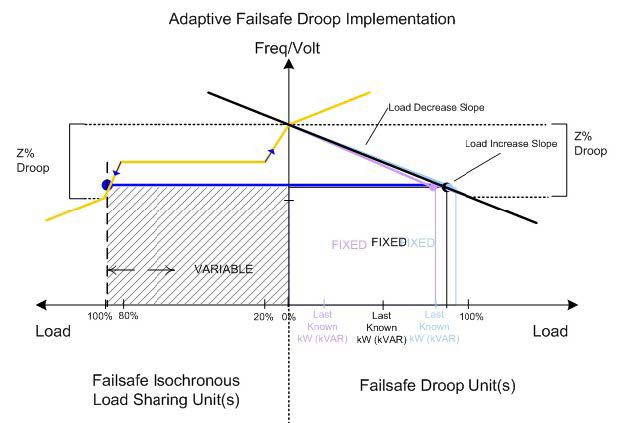
Figura 1: La operación de caída adaptativa contra fallas se adapta con el tiempo a medida que la carga cambia para estabilizar el sistema
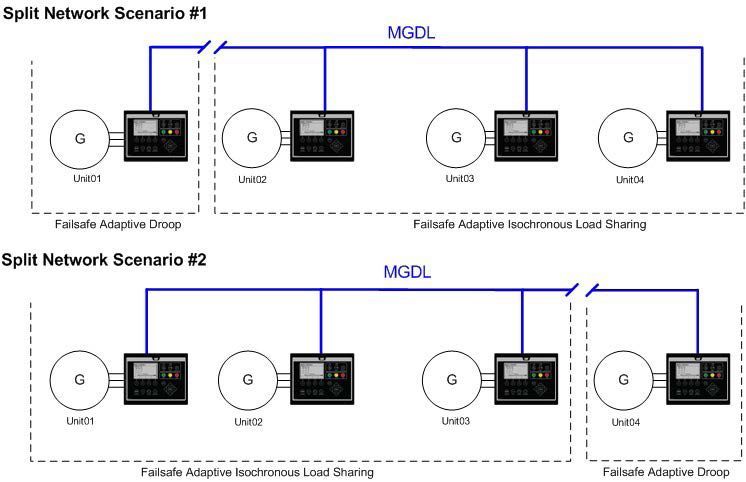
Situaciones de red dividida 1 y 2
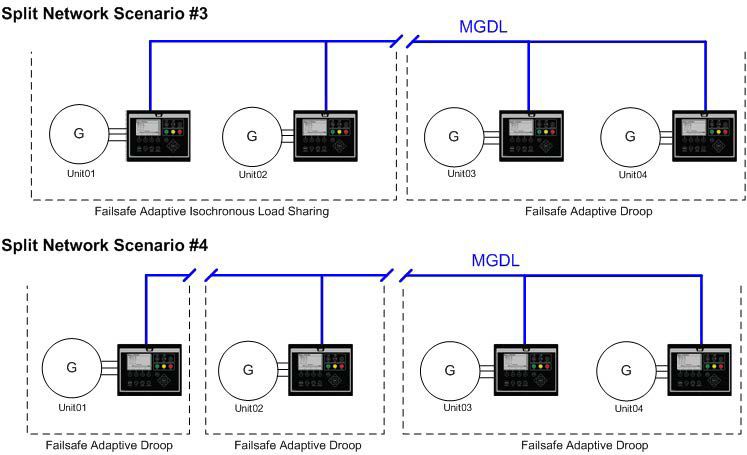
Situaciones de red dividida 3 y 4
Por ejemplo, si las unidades que perdieron la comunicación siguen en marcha y en la barra colectora, es necesario que funcionen con seguridad. El sistema MGDL patentado de Caterpillar utiliza el conocimiento de la topología de red para tomar decisiones conservadoras sobre las unidades faltantes. La pérdida de comunicación genera una red dividida. Las unidades se separan en un grupo de intercambio de carga isócrono y un grupo de caída según los siguientes parámetros:
- La cantidad de unidades que mantienen la comunicación sobre la cantidad total esperada de controles
- El número de unidad MGDL más bajo
La manera en que EMCP 4.4 aborda las divisiones en la red
Aplican cuatro situaciones de red dividida básicas, según el lugar en la red donde ocurre el corte de la comunicación.
Situación 1. Si un controlador (Unidad 01, por ejemplo) detecta menos de la mitad de la cantidad esperada de controles en línea (una minoría), la minoría funciona en la modalidad de caída adaptativa contra fallas y el resto en la modalidad de intercambio de carga isócrona adaptativa contra fallas.
Situación 2. Si un controlador (Unidad 01, por ejemplo) detecta más de la mitad de la cantidad esperada de controles en línea (una mayoría), la mayoría funciona en la modalidad de intercambio de carga isócrona adaptativa contra fallas y el resto en la modalidad de caída adaptativa contra fallas.
Situación 3. Si un controlador detecta exactamente la mitad de la cantidad esperada de controles en la red, hay dos posibilidades. Si el control detecta el número de unidad más bajo, esa unidad y las otras unidades en su mitad funcionan en la modalidad de intercambio de carga isócrona adaptativa contra fallas y la otra mitad en la modalidad de caída adaptativa contra fallas. Si el control no detecta el número de unidad más bajo, ocurre lo opuesto.
Situación 4. Si ocurren varias divisiones en la red en momentos diferentes, es posible que los controles operen todos en la modalidad de caída adaptativa contra fallas y ninguno en la modalidad de intercambio de carga isócrona adaptativa contra fallas.
ESTUDIO DE CASO
En un ejemplo simplificado, se demuestra cómo responden los grupos electrógenos a una ruptura de la comunicación en la estrategia de control de operación adaptativa contra fallas de intercambio/caída de carga. En este y otros casos, los grupos electrógenos siguen instrucciones programadas para funcionar de manera uniforme hasta un punto de equilibrio en el que el sistema responde de forma adecuada para aceptar o desechar cargas en vez de saltar rápido a un nivel de producción predeterminado.
Sin importar si las unidades tienen mucha o poca carga cuando ocurre la ruptura, la estrategia de control permite que el sistema se adapte y permanezca estable. Las unidades responden a la carga de manera uniforme, segura y lenta según curvas de carga previamente programadas. Asimismo, el enfoque preserva mayor capacidad de carga del sistema que la respuesta tradicional a una falla de comunicación.
Cuando se detecta una ruptura de la comunicación, los grupos electrógenos en el grupo mayoritario pasan a un funcionamiento isócrono modificado, mientras que los grupos electrógenos en el grupo minoritario pasan a la caída adaptativa, que en un principio "se congela" en el último nivel de carga. Cuando la carga aumenta, las unidades isócronas absorben el incremento. Las cargas en las unidades de caída no cambian.
Si las cargas siguen aumentando, las unidades isócronas continúan aceptando cargas hasta el 80 % de la capacidad. En ese punto, las unidades isócronas se resisten a tomar más carga, la frecuencia baja y las unidades de caída aceptan más carga. Un proceso similar ocurre cuando la carga disminuye.
Las modalidades adaptativas contra fallas de intercambio y caída de carga generan dos efectos básicos:
- Cambian perfectamente las unidades a una modalidad de funcionamiento contra fallas sin dejar de proporcionar cargas con una mínima alteración del sistema.
- Proporcionan una distribución pareja de las cargas entre las unidades para servir mejor la carga, mediante la prevención de cargas insuficientes o excesivas prematuras de las unidades isócronas.
Regreso a la normalidad
El uso previsto de las modalidades adaptativas contra fallas de intercambio y caída de carga es solo el funcionamiento ante fallas, no el funcionamiento normal durante períodos prolongados. Si bien un sistema de generador que funciona en modalidad contra fallas trabaja la carga del sistema de manera adecuada, el intercambio de carga MGDL normal es una modalidad de funcionamiento más robusta y estable.
Una vez activadas las modalidades contra fallas, el sistema requiere investigación. La alarma indica cuándo ocurrió una pérdida de comunicación. La indicación puede ser una luz intermitente, una señal auditiva, un mensaje de texto o una llamada a los teléfonos inteligentes de los operadores o alguna combinación de estos, según la configuración del sistema de alarma. Una vez recibida la alarma, se deben seguir los pasos de solución de problemas correspondientes lo antes posible para restablecer el funcionamiento normal del sistema.
El protocolo de intercambio de carga está diseñado para permitir la transición a las modalidades contra fallas y de estas con la mayor perfección posible, aunque no se puede dar una garantía absoluta. Los cambios en las ganancias del intercambio de carga y la carga del sistema afectan de manera considerable la capacidad de transición entre las modalidades de funcionamiento contra fallas y normal sin alteraciones.
En resumen, la operación adaptativa contra fallas de intercambio/caída de carga ofrece una ventaja única en la prestación de estabilidad incluso después de una falla de punto único en un sistema de potencia de varios generadores.
Acerca de los autores
Ed Schroeder es especialista de ingeniería sénior de la división de Corriente Eléctrica de Caterpillar.
Keith Folken es especialista de ingeniería sénior en la división de Innovación y Desarrollo Tecnológico de Caterpillar.